Design Competition
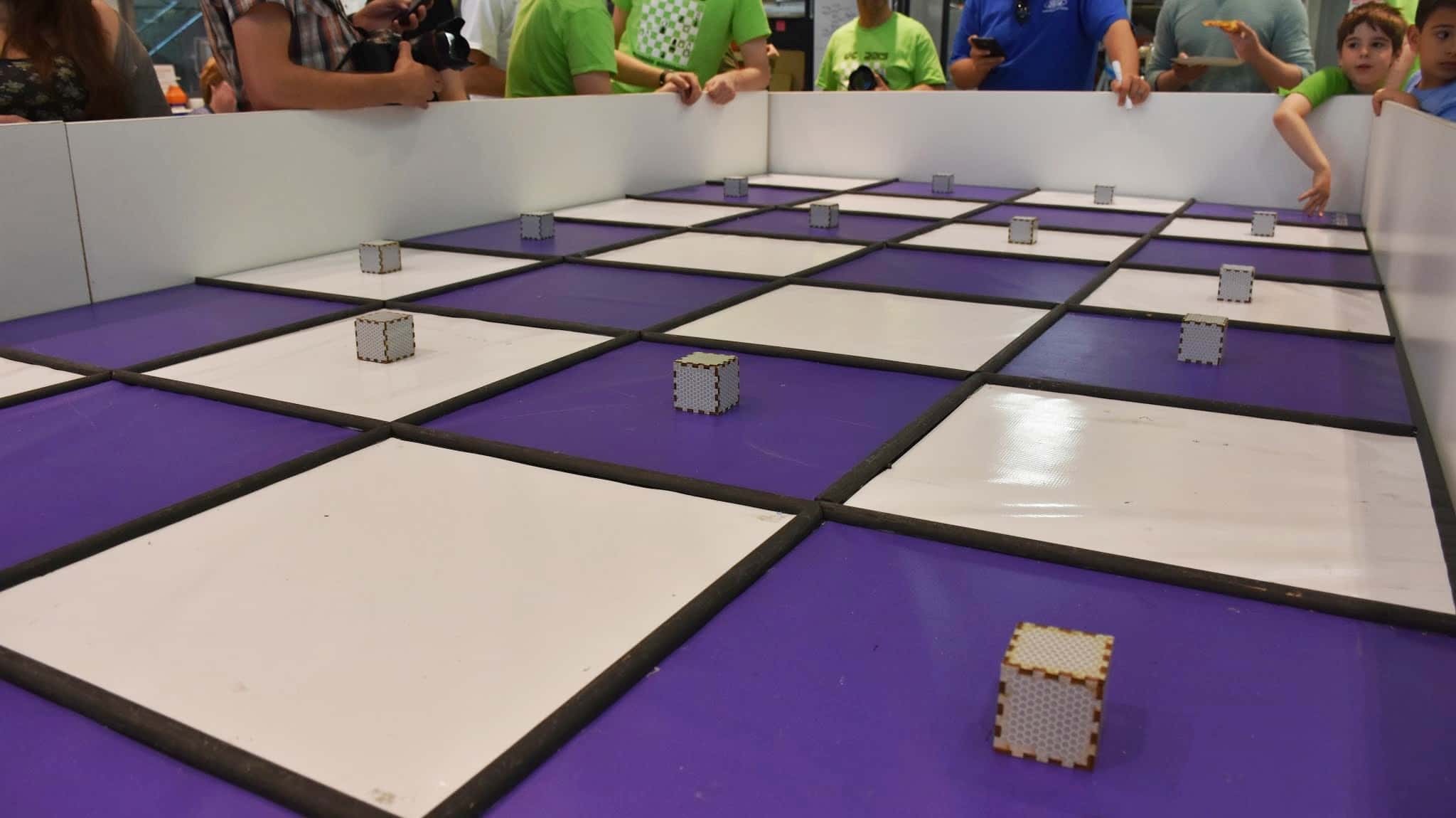
During the spring of 2015, I competed in the Northwestern Design Competition. It is an anual autonomous robot competition. Each year student create robots to play a different game. This year the game was Robot Checkers. Each robot attempted to pick up two-inch cubes and place them on their team’s color in the checkerboard arena. Robots could steal dropped cubes from opponents and earn extra points for stacking cubes.
My team was a group of three. I was in charge of the navigation algorithim, sensor integration and assisted in the mechanical design. I created two different navigation algorihtims. One discretized the checkerboard into distinct states based on the location and direction of the robot. However, we had problems if we collided with the other robot.
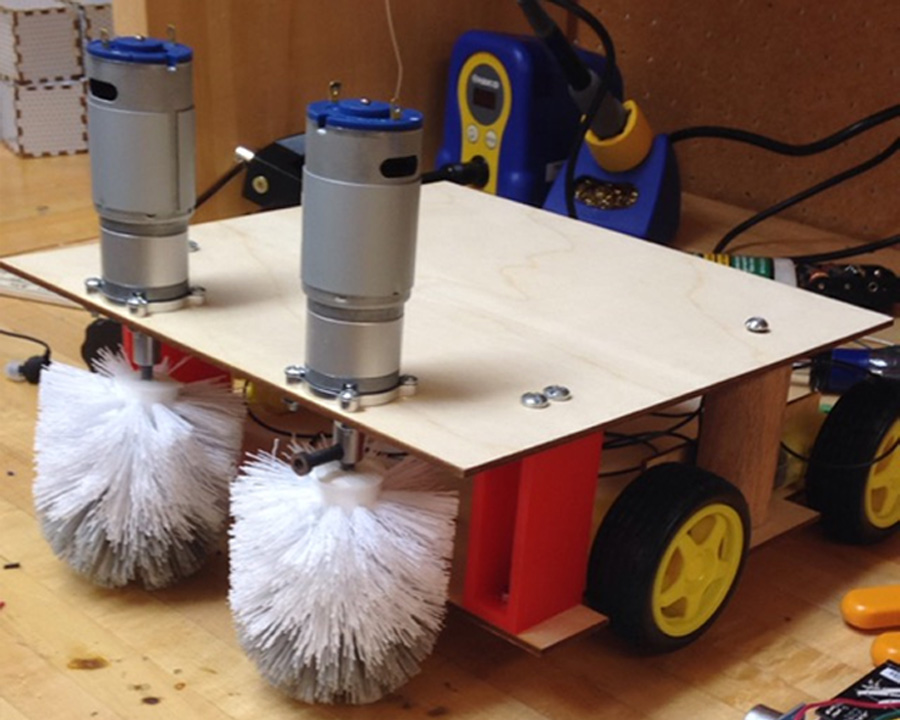
To fix this, I switched navigation algorithim to a random motion algorithim. Our robot would go straight, picking up all blocks in the way. When it hit something, it detected it through bump sensors and we backed up and turned away from the collision. It would then continue straight. It would also attempt to dump blocks whenever it detected it was on the correct color. Color was detected through combinations of leds and phototransistors on the bottom of the robot.
